
Page 224 - 256_
P. 224
тобто при використовуванні ε’ =х т-х з необхідно так
сформувати регулюючу дію у, щоб воно компенсувало
розузгодження.
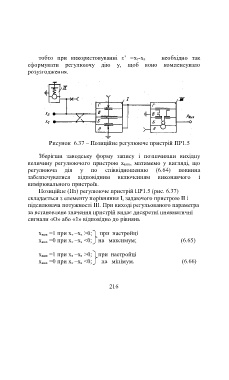
Рисунок 6.37 – Позиційне регулююче пристрій ПР1.5
Зберігши заводську форму запису і позначивши вихідну
величину регулюючого пристрою х вих, матимемо у вигляді, що
регулююча дія у по співвідношенню (6.64) повинна
забезпечуватися відповідним включенням виконавчого і
вимірювального пристроїв.
Позиційне (Пз) регулююче пристрій ПР1.5 (рис. 6.37)
складається з елементу порівняння І, задаючого пристрою ІІ і
підсилювача потужності ІІІ. При виході регульованого параметра
за встановлене значення пристрій видає дискретні пневматичні
сигнали «О» або «1» відповідно до рівнянь
х вих =1 при х т –х з >0; при настройці
х вих =0 при х т –х з <0; на максимум; (6.65)
х вих =1 при х т –х з >0; при настройці
х вих =0 при х т –х з <0; на мінімум. (6.66)
216