
Page 92 - Векерик В
P. 92
88
Перетворювачі МПП складаються з міждросельної камери, обмеженої
двома пневматичними дроселями- постійним і змінним ( або двома змінними),
один із яких служить для підводу тиску живлення, а другий-для стравлювання
повітря в атмосферу.Механічне переміщення, створене ЕМП, використовується
для керування величиною відкривання одного або двох змінних дроселів.
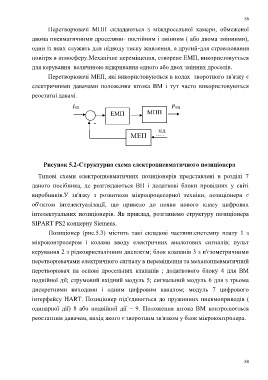
Перетворювачі МЕП, які використовуються в колах зворотного зв'язку є
електричними давачами положення штока ВМ і тут часто використовуються
реостатні давачі.
Iвх Pви
ЕМП МПП х
-
- хід
МЕП ВМ
Рисунок 5.2-Структурна схема електропневматичного позиціонера
Типові схеми електропневматичних позиціонерів представлені в розділі 7
даного посібника, де розглядаються ВП і додаткові блоки провідних у світі
виробників.У зв'язку з розвитком мікропроцесорної техніки, позиціонери є
об'єктом інтелектуалізації, що привело до появи нового класу цифрових
інтелектуальних позиціонерів. Як приклад, розглянемо структуру позиціонера
SIPART PS2 концерну Siemens.
Позиціонер (рис.5.3) містить такі складові частини:системну плату 1 з
мікроконтролером і колами вводу електричних аналогових сигналів; пульт
керування 2 з рідкокристалічним дисплеєм; блок клапанів 3 з п'єзометричними
перетворювачами електричного сигналу в переміщення та механопневматичний
перетворювач на основі дросельних клапанів ; додаткового блоку 4 для ВМ
подвійної дії; струмовий вхідний модуль 5; сигнальний модуль 6 для з трьома
дискретними виходами і одним цифровим каналом; модуль 7 цифрового
інтерфейсу HART. Позиціонер під'єднюється до пружинних пневмоприводів (
одинарної дії) 8 або подвійної дії – 9. Положення штока ВМ контролюється
реостатним давачем, вихід якого є зворотним зв'язком у блок мікроконтролера.
88