
Page 90 - Векерик В
P. 90
86
Мембранні ВМ мають нелінійною ходовою характеристикою (діють сили
тертя в приводі і РО). Для підвищення чутливості й ліквідації нелінійностей
приводу використовують позиціонери - пристрої, що реалізують зворотні
від'ємні зв'язки за переміщенням або зусиллям. Найчастіше використовуються
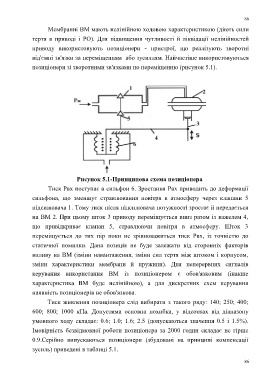
позиціонери зі зворотними зв'язками по переміщенню (рисунок 5.1).
Рисунок 5.1-Принципова схема позиціонера
Тиск Рвх поступає в сильфон 6. Зростання Рвх приводить до деформації
сильфона, що зменшує стравлювання повітря в атмосферу через клапани 5
підсилювача 1. Тому тиск після підсилювача потужності зростає й передається
на ВМ 2. При цьому шток 3 приводу переміщується вниз разом із важелем 4,
що привідкриває клапан 5, стравлюючи повітря в атмосферу. Шток 3
переміщується до тих пір поки не зрівноважиться тиск Рвх, із точністю до
статичної помилки. Дана позиція не буде залежати від сторонніх факторів
впливу на ВМ (зміни навантаження, зміни сил тертя між штоком і корпусом,
зміни характеристики мембрани й пружини). Дня неперервних сигналів
керування використання ВМ із позиціонером є обов'язковим (інакше
характеристика ВМ буде нелінійною), а для дискретних схем керування
наявність позиціонерів не обов'язкова.
Тиск живлення позиціонера слід вибирати з такого ряду: 140; 250; 400;
600; 800; 1000 кПа. Допустима основна похибка, у відсотках від діапазону
умовного ходу складає: 0.6; 1.0; 1.6; 2.5 (допускаються значення 0.5 і 1.5%).
Імовірність безвідмовної роботи позиціонера за 2000 годин складає не гірше
0.9.Серійно випускаються позиціонери (збудовані на принципі компенсації
зусиль) приведені в таблиці 5.1.
86