
Page 84 - Векерик В
P. 84
81
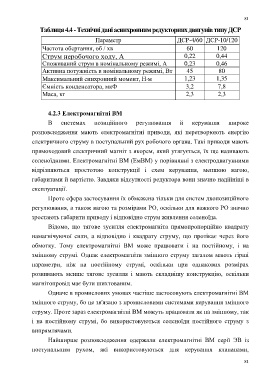
Таблиця 4.4 - Технічні дані асинхронним редукторних двигунів типу ДСР
Параметр ДСР-4/60 ДСР-10/120
Частота обертання, об / хв 60 120
Струм неробочого ходу, А 0,22 0,44
Споживаний струм в номінальному режимі, А 0,23 0,46
Активна потужність в номінальному режимі, Вт 45 80
Максимальний синхронний момент, Н м 1,23 1,35
Ємність конденсатора, мкФ 3,2 7,8
Маса, кг 2,3 2,3
4.2.3 Електромагнітні ВМ
В системах позиційного регулювання й керування широке
розповсюдження мають електромагнітні приводи, які перетворюють енергію
електричного струму в поступальний рух робочого органа. Такі приводи мають
прямоходовий електричний магніт з якорем, який утягується, їх ще називають
соленоїдними. Електромагнітні ВМ (ЕмВМ) у порівнянні з електродвигунними
відрізняються простотою конструкції і схем керування, меншою вагою,
габаритами й вартістю. Завдяки відсутності редуктора вони значно надійніші в
експлуатації.
Проте сфера застосування їх обмежена тільки для систем двопозиційного
регулювання, а також вагою та розмірами РО, оскільки для важкого РО значно
зростають габарити приводу і відповідно струм живлення соленоїда.
Відомо, що тягове зусилля електромагніта прямопропорційно квадрату
намагнічуючої сили, а відповідно і квадрату струму, що протікає через його
обмотку. Тому електромагнітні ВМ може працювати і на постійному, і на
змінному струмі. Однак електромагніти змінного струму загалом мають гірші
параметри, ніж на постійному струмі, оскільки при однакових розмірах
розвивають менше тягове зусилля і мають складнішу конструкцію, оскільки
магнітопровід має бути шихтованим.
Одначе в промислових умовах частіше застосовують електромагнітні ВМ
змінного струму, бо це зв'язано з промисловими системами керування змінного
струму. Проте зараз електромагнітні ВМ можуть працювати як на змінному, так
і на постійному струмі, бо використовуються соленоїди постійного струму з
випрямлячами.
Найширше розповсюдження одержали електромагнітні ВМ серії ЭВ із
поступальним рухом, які використовуються для керування клапанами,
81