
Page 54 - Міністерство освіти України
P. 54
Звичайно, що будь-яка модель повинна одержати експериментальне
підтвердження і тільки після цього може бути використана для дослідження
і узагальнення.
Визначення динамічних характеристик виконавчого пристрою,
дослідження його моделі та можливості апроксимації більш простими
динамічними ланками є поштовхом для вивчення поведінки ВП в системі
регулювання, у взаємодії його з іншими елементами контуру.
-y
K к
Т І р 1
K
К р0 К ВМ об К УС К р
Т об р 1
d
dt
f тр
f тр
з.з
К
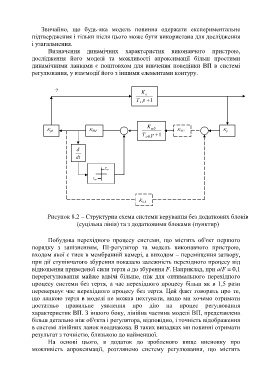
Рисунок 8.2 – Структурна схема системи керування без додаткових блоків
(суцільна лінія) та з додатковими блоками (пунктир)
Побудова перехідного процесу системи, що містить об'єкт першого
порядку з запізненням, ПІ-регулятор та модель виконавчого пристрою,
входом якої є тиск в мембранній камері, а виходом – переміщення затвору,
при дії ступінчатого збурення показало залежність перехідного процесу від
відношення приведеної сили тертя а до збурення F. Наприклад, при а/F = 0,1
перерегулювання майже вдвічі більше, ніж для оптимального перехідного
процесу системи без тертя, а час перехідного процесу більш як в 1,5 рази
перевершує час перехідного процесу без тертя. Цей факт говорить про те,
що ланкою тертя в моделі не можна нехтувати, якщо ми хочемо отримати
достатньо правильне уявлення про дію на процес регулювання
характеристик ВП. З іншого боку, лінійна частина моделі ВП, представлена
більш детально ніж об'єкта і регулятора, відповідно, і точність відображення
в системі лінійних ланок неоднакова. В таких випадках ми повинні отримати
результат з точністю, близькою до найменшої.
На основі цього, в додаток до зробленого вище висновку про
можливість апроксимації, розглянемо систему регулювання, що містить