
Page 111 - Міністерство освіти і науки України
P. 111
ОП
n(t) n(t) (розр)
ДЧ t б.оп
t = 3 3
б.оп K P n
КО P(t) ДН P(t) 3 2 t б.осн БЛВ
(розр)
= (1+m) -1
t б.осн. K P n 2
2
h(t) h(t) 2
ДП
Порог. Фактична
*
P(t) kM(t) kM(t) K (t) пристр. відробка БПРК
M
n(t) v(t) GZ (K M ) K M = 2.5 долота
БЗ
Порог.
v(t) K (t) пристр.
h d ( 1 ) GZ (K ) K = 2.5 Межа
t K = v 0 dt v t пластів
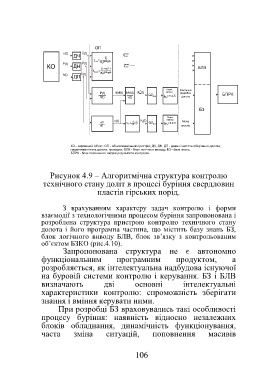
КО - керований об'єкт; ОП - обчислювальний пристрій; ДЧ, ДН, ДП - давачі частоти обертання долота,
навантаження на долото, проходки; БЛВ - блок логічного виводу; БЗ - база знань;
БПРК - блок пояснення і видачі результатів контролю.
Рисунок 4.9 – Алгоритмічна структура контролю
технічного стану доліт в процесі буріння свердловин 102
пластів гірських порід.
З врахуванням характеру задач контролю і форми
взаємодії з технологічними процесом буріння запропонована і
розроблена структура пристрою контролю технічного стану
долота і його програмна частина, що містить базу знань БЗ,
блок логічного виводу БЛВ, блок зв’язку з контрольованим
об’єктом БЗКО (рис.4.10).
Запропонована структура не є автономно
функціональним програмним продуктом, а
розробляється, як інтелектуальна надбудова існуючої
на буровій системи контролю і керування. БЗ і БЛВ
визначають дві основні інтелектуальні
характеристики контролю: спроможність зберігати
знання і вміння керувати ними.
При розробці БЗ враховувались такі особливості
процесу буріння: наявність відносно незалежних
блоків обладнання, динамічність функціонування,
часта зміна ситуацій, поповнення масивів
106