
Page 23 - 6856
P. 23
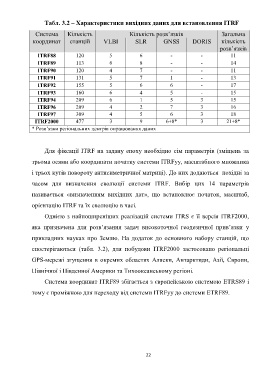
Табл. 3.2 – Характеристики вихідних даних для встановлення ITRF
Система Кількість Кількість розв’язків Загальна
координат станцій VLBI SLR GNSS DORIS кількість
розв’язків
ITRF88 120 5 6 - - 11
ITRF89 113 6 8 - - 14
ITRF90 120 4 7 - - 11
ITRF91 131 5 7 1 - 13
ITRF92 155 5 6 6 - 17
ITRF93 160 6 4 5 - 15
ITRF94 209 6 1 5 3 15
ITRF96 209 4 2 7 3 16
ITRF97 309 4 5 6 3 18
ITRF2000 477 3 9 6+8* 3 21+8*
* Розв’язки регіональних центрів опрацювання даних
Для фіксації ITRF на задану епоху необхідно сім параметрів (зміщень за
трьома осями або координати початку системи ITRFyy, масштабного множника
і трьох кутів повороту антисиметричної матриці). До них додаються похідні за
часом для визначення еволюції системи ITRF. Вибір цих 14 параметрів
називається «визначенням вихідних дат», що встановлює початок, масштаб,
орієнтацію ITRF та їх еволюцію в часі.
Однією з найпоширеніших реалізацій системи ITRS є її версія ITRF2000,
яка призначена для розв’язання задач високоточної геодезичної прив’язки у
прикладних науках про Землю. На додаток до основного набору станцій, що
спостерігаються (табл. 3.2), для побудови ITRF2000 застосовано регіональні
GPS-мережі згущення в окремих областях Аляски, Антарктиди, Азії, Європи,
Північної і Південної Америки та Тихоокеанському регіоні.
Система координат ITRF89 збігається з європейською системою ETRS89 і
тому є проміжною для переходу від системи ITRFyy до системи ETRF89.
22