
Page 6 - 6805
P. 6
У курсовій роботі студентові необхідно виконати комплекс розрахунків
автоматичної системи керування, заданої у вигляді узагальненої уніфікованої
алгоритмічної схеми (рис 1.1).
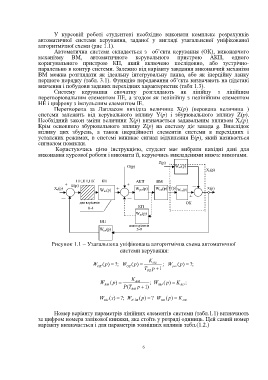
Автоматична система складається з об’єкта керування (ОК), виконавчого
механізму ВМ, автоматичного керувального пристрою АКП, одного
коригувального пристрою КП, який включено послідовно, або зустрічно-
паралельно в контур системи. Залежно від варіанту завдання виконавчий механізм
ВМ можна розглядати як ідеальну інтегрувальну ланка, або як інерційну ланку
першого порядку (табл. 3.1). Функцію передавання об’єкта визначають на підставі
вивчення і побудови заданих перехідних характеристик (табл 1.3).
Систему керування спочатку розглядають як лінійну з лінійним
перетворювальним елементом ПЕ, а згодом як нелінійну з нелінійним елементом
НЕ і цифрову з імпульсним елементом ІЕ.
Перетворена за Лапласом вихідна величина Х(р) (керована величина )
системи залежить від керувального впливу Y(р) і збурювального впливу Z(р).
Необхідний закон зміни величини Х(р) визначається задавальним впливом Х з(р) .
Крім основного збурювального впливу Z(р) на систему діє завада g. Внаслідок
впливу цих збурень, а також інерційності елементів системи в перехідних і
усталених режимах, в системі виникає сигнал відхилення Е(р), який називається
сигналом помилки.
Користуючись цією інструкцією, студент має вибрати вихідні дані для
виконання курсової роботи і виконати її, керуючись викладеними нижче вимогами.
Z(p)
G(р) W oz (p)
X z (p)
ПЕ,НЕ,ПК КП AКП ВМ
+ Е(р) +
Х з (р) W кп (р) + W рег (р) W вм (р) Y(p) W ок(р) X(p)
+
для варіантів ОК
0-4 КП
W кз (р)
ВП
для варіантів
W вп (р) 5-9
Рисунок 1.1 – Узагальнена уніфікована алгоритмічна схема автоматичної
системи керування:
K
W (р ) ?; W (р ) OZ ; W (р ) ?;
ОК OZ рег
T р 1
OZ
K
W (р ) ВМ ; W ( ) р K ;
ВМ ВМ ВП
P (T р ) 1
ВМ
W (з ) ?; W (р ) ? W ( р ) K
КП К .ЗВ ПЕ ПЕ
Номер варіанту параметрів лінійних елементів системи (табл.1.1) визначають
за цифром номера залікової книжки, яка стоїть у розряді одиниць. Цей самий номер
варіанту визначається і для параметрів зовнішніх впливів табл.(1.2.)
6