
Page 147 - 5
P. 147
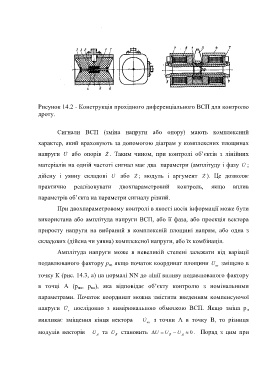
Рисунок 14.2 - Конструкція прохідного диференціального ВСП для контролю
дроту.
Сигнали ВСП (зміна напруги або опору) мають комплексний
характер, який враховують за допомогою діаграм у комплексних площинах
напруги U або опорів Z . Таким чином, при контролі об’єктів з лінійних
матеріалів на одній частоті сигнал має два параметри (амплітуду і фазу U ;
дійсну і уявну складові U або Z ; модуль і аргумент Z ). Це дозволяє
практично реалізовувати двохпараметровий контроль, якщо вплив
параметрів об’єкта на параметри сигналу різний.
При двохпараметровому контролі в якості носія інформації може бути
використана або амплітуда напруги ВСП, або її фаза, або проекція вектора
приросту напруги на вибраний в комплексній площині напрям, або одна з
складових (дійсна чи уявна) комплексної напруги, або їх комбінація.
Амплітуда напруги може в невеликій степені залежати від варіації
подавлюваного фактору p п, якщо початок координат площини U зміщено в
вн
точку К (рис. 14.3, а) на нормалі NN до лінії впливу подавлюваного фактору
в точці А (р по, р ко), яка відповідає об’єкту контролю з номінальними
параметрами. Початок координат можна змістити введенням компенсуючої
напруги U послідовно з вимірювальною обмоткою ВСП. Якщо зміна р п
к
викликає зміщення кінця вектора U з точки А в точку В, то різниця
вн
модулів векторів U та U становить U U U 0. Поряд з цим при
A B B A