
Page 149 - 5
P. 149
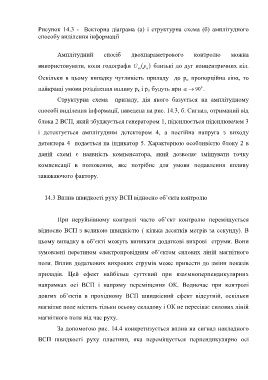
Рисунок 14.3 - Векторна діаграма (а) і структурна схема (б) амплітудного
способу виділення інформації
Амплітудний спосіб двохпараметрового контролю можна
використовувати, коли годографи U р близькі до дуг концентричних кіл.
вн п
Оскільки в цьому випадку чутливість приладу до р к пропорційна sinα, то
0
найкращі умови розділення впливу р к і р п будуть при 90 .
Структурна схема приладу, дія якого базується на амплітудному
способі виділення інформації, наведена на рис. 14.3, б. Сигнал, отриманий від
блока 2 ВСП, який збуджується генератором 1, підсилюється підсилювачем 3
і детектується амплітудним детектором 4, а постійна напруга з виходу
детектора 4 подається на індикатор 5. Характерною особливістю блоку 2 в
даній схемі є наявність компенсатора, який дозволяє зміщувати точку
компенсації в положення, яке потрібне для умови подавлення впливу
заважаючого фактору.
14.3 Вплив швидкості руху ВСП відносно об’єкта контролю
При неруйнівному контролі часто об’єкт контролю переміщується
відносно ВСП з великою швидкістю ( кілька десятків метрів за секунду). В
цьому випадку в об’єкті можуть виникати додаткові вихрові струми. Вони
зумовлені перетином електропровідним об’єктом силових ліній магнітного
поля. Вплив додаткових вихрових струмів може привести до зміни показів
приладів. Цей ефект найбільш суттєвий при взаємноперпендикулярних
напрямках осі ВСП і напряму переміщення ОК. Водночас при контролі
довгих об’єктів в прохідному ВСП швидкісний ефект відсутній, оскільки
магнітне поле містить тільки осьову складову і ОК не пересікає силових ліній
магнітного поля під час руху.
За допомогою рис. 14.4 конкретизується вплив на сигнал накладного
ВСП швидкості руху пластини, яка переміщується перпендикулярно осі