
Page 107 - 4757
P. 107
помилка дорівнювала нулю потрібно в знаменник ввести ще один
оператор 1/p тобто в САК треба ввести додаткову інтегруючу
ланку. Тоді помилка керування буде рівна нулю як у статичному,
так і в динамічному режимі з постійною швидкістю зміни
керуючої та збуджуючої величин. Систему, яка має дві
інтегруючі ланки для забезпечення нульової помилки за
швидкістю зміни діючих величин, називають астатичною
системою другого порядку.
Якщо розглядати вимогу забезпечення нульової помилки за
прискоренням діючих величин, то аналогічно ми прийдемо до
потреби включити ще одну інтегруючу ланку. Систему з трьома
інтегруючими ланками називають астатичною системою третього
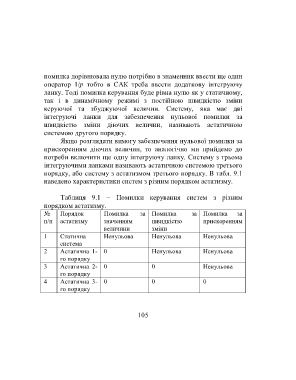
порядку, або систему з астатизмом третього порядку. В табл. 9.1
наведено характеристики систем з різним порядком астатизму.
Таблиця 9.1 – Помилки керування систем з різним
порядком астатизму.
№ Порядок Помилка за Помилка за Помилка за
п/п астатизму значенням швидкістю прискоренням
величини зміни
1 Статична Ненульова Ненульова Ненульова
система
2 Астатична 1- 0 Ненульова Ненульова
го порядку
3 Астатична 2- 0 0 Ненульова
го порядку
4 Астатична 3- 0 0 0
го порядку
105