
Page 105 - 4757
P. 105
оскільки можуть існувати обмеження на елементи системи
керування і не допускати збільшення їх коефіцієнта підсилення. З
іншого боку, збільшення коефіцієнта підсилення веде до втрати
стійкості системи, тому завжди має певні обмеження.
Інший спосіб підвищення точності керування полягає у
зміні структури. САК.
Якщо розглянути величину помилки керування згідно з
формулою (9.2), то видно, що помилка керування дорівнюватиме
нулю, якщо знаменник буде рівним нескінченності. Здійснити це
можна, перейшовши до астатичної системи.
Астатичною називається система, помилка керування якої
в статичному режим роботи в принципі дорівнює нулю.
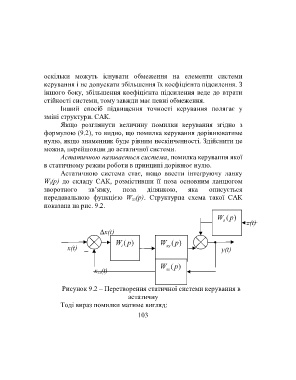
Астатичною система стає, якщо ввести інтегруючу ланку
W i(p) до складу САК, розмістивши її поза основним ланцюгом
зворотного зв’язку, поза ділянкою, яка описується
передавальною функцією W зз(p). Структурна схема такої САК
показана на рис. 9.2.
W ( )p
z z(t)
Δx(t)
W ( )p W ( )p
x(t) i xy y(t)
W ( )p
x зз(t) зз
Рисунок 9.2 – Перетворення статичної системи керування в
астатичну
Тоді вираз помилки матиме вигляд:
103