
Page 79 - 4719
P. 79
Складемо систему обмежень. Оскільки, компенсуючий
пристрій може бути встановлений тільки в одному вузлі, сума
двійкових змінних повинна дорівнювати 1.
δ 1 +δ 2 +δ 3 = , 1
деδ , δ і δ - двійкові.
1
3
2
Величина дискретної змінної Q залежатиме від
Kі
значення відповідної двійкової змінної δ . Змінна Q = Q
K
Kі
і
при δ і = 1 і Q Kі = 0 при δ і = 0 . Запишемо дані умови:
Q = Q δ 1 ;
K
1
K
;
Q K 2 = Q δ 2
K
Q = Q δ .
K
3
K
3
Граничні умови не записуємо, оскільки маємо тільки
дискретні і двійкові змінні.
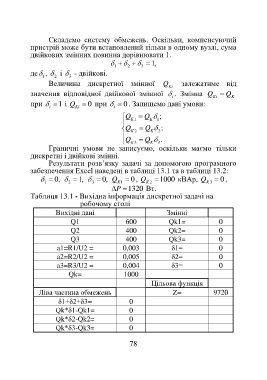
Результати розв’язку задачі за допомогою програмного
забезпечення Excel наведені в таблиці 13.1 та в таблиці 13.2:
δ 1 = , 0 δ 2 = , 1 δ 3 = , 0 Q K 1 = 0, Q K 2 = 1000 кВАр, Q K 3 = 0,
P
∆= 1320 Вт.
Таблиця 13.1 - Вихідна інформація дискретної задачі на
робочому столі
Вихідні дані Змінні
Q1 600 Qk1= 0
Q2 400 Qk2= 0
Q3 400 Qk3= 0
a1=R1/U2 = 0,003 δ1= 0
a2=R2/U2 = 0,005 δ2= 0
a3=R3/U2 = 0,004 δ3= 0
Qk= 1000
Цільова функція
Ліва частина обмежень Z= 9720
δ1+δ2+δ3= 0
Qk*δ1-Qk1= 0
Qk*δ2-Qk2= 0
Qk*δ3-Qk3= 0
78