
Page 77 - 4670
P. 77
thing onto another, such as a curved 3-Dimensional surface (like the
Earth) onto a flat 2-Dimensional map. There are 3 major types of
projections: cylindrical, conic, and planar.
Since a map is 2-dimensional representation of a 3-dimensional
world, compromises must be made in accuracy (some information
must be lost when one dimension is ignored). Different maps differ in
the relative accuracy of the depiction of the area, the shapes of objects,
actual distances, and compass direction. Maps that focus on
maintaining one feature (like preserving distance) must distort other
features (like area, shape and compass directions).
Maps that accurately reflect area are often called equal-area maps
(an example is the Albers equal-area conic map). Maps that maintain
the shape of objects are called conformal. Maps that correctly show
the distance between points are often called equi-distant maps (note
that the shortest distance between two points on a map is generally not
a straight line. but a curve). Navigational maps need accurate compass
directions maintained on the map (like the Mercator map).
Depending on the purpose of a map, the cartographer will attempt
to eliminate distortion in one or several aspects of the map. Remember
that not all aspects can be accurate so the map maker must choose
which distortions are less important than the others. The map maker
may also choose to allow a little distortion in all four of these aspects
to produce the right type of map.
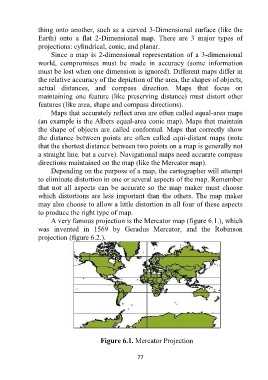
A very famous projection is the Mercator map (figure 6.1.), which
was invented in 1569 by Geradus Mercator, and the Robinson
projection (figure 6.2.).
Figure 6.1. Mercator Projection
77