
Page 61 - 4274
P. 61
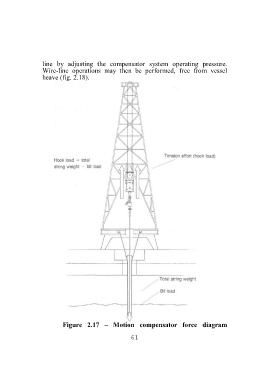
line by adjusting the compensator system operating pressure.
Wire-line operations may then be performed, free from vessel
heave (fig. 2.18).
Figure 2.17 – Motion compensator force diagram
61