
Page 96 - 4219-
P. 96
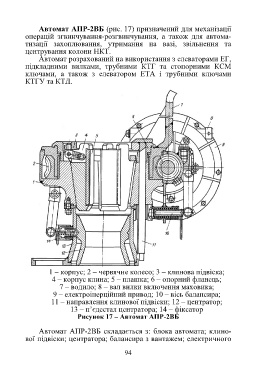
Автомат АПР-2ВБ (рис. 17) призначений для механізації
операцій згвинчування-розгвинчування, а також для автома-
тизації захоплювання, утримання на вазі, звільнення та
центрування колони НКТ.
Автомат розрахований на використання з елеваторами ЕГ,
підкладними вилками, трубними КТГ та стопорними КСМ
ключами, а також з елеватором ЕТА і трубними ключами
КТГУ та КТД.
1 – корпус; 2 – червячне колесо; 3 – клинова підвіска;
4 – корпус клина; 5 – плашка; 6 – опорний фланець;
7 – водило; 8 – вал вилки включення маховика;
9 – електроінерційний привод; 10 – вісь балансира;
11 – направлення клинової підвіски; 12 – центратор;
13 – п’єдестал центратора; 14 – фіксатор
Рисунок 17 – Автомат АПР-2ВБ
Автомат АПР-2ВБ складається з: блока автомата; клино-
вої підвіски; центратора; балансира з вантажем; електричного
94