
Page 43 - 197_
P. 43
П i X X
1
11
1m
{П } {X }
ij
i
П X X
n1
n
nm
1 2 J
3 Ктр {Ктр } Ктр
m
j
1
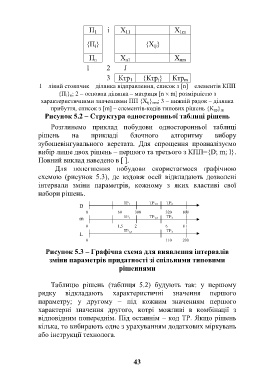
1 – лівий стовпчик – ділянка відправлення, список з [n] – елементів КПП
{П і} n; 2 – основна ділянка – матриця [n m] розмірністю з
характеристичними значеннями ПП {Х іj} nm; 3 – нижній рядок – ділянка
прибуття, список з [m] – елементів-кодів типових рішень {К тр} m
Рисунок 5.2 – Структура односторонньої таблиці рішень
Розглянемо приклад побудови односторонньої таблиці
рішень на прикладі блочного алгоритму вибору
зубошевінгувального верстата. Для спрощення проаналізуємо
вибір лише двох рішень – першого та третього з КПП={D; m; l}.
Повний виклад наведено в [ ].
Для полегшення побудови скористаємося графічною
схемою (рисунок 5.3), де вздовж осей відкладають дозволені
інтервали зміни параметрів, кожному з яких властиві свої
набори рішень.
ТР 1 ТР 1,3 ТР 2
D
0 60 300 320 800
m ТР 1 ТР 1,3 ТР 3
0 1,5 2 6 8
ТР 1,3 ТР 3
L
0 110 200
Рисунок 5.3 – Графічна схема для виявлення інтервалів
зміни параметрів придатності зі спільними типовими
рішеннями
Таблицю рішень (таблиця 5.2) будують так: у першому
рядку відкладають характеристичні значення першого
параметру; у другому – під кожним значенням першого
характерні значення другого, котрі можливі в комбінації з
відповідним попереднім. Під останнім – код ТР. Якщо рішень
кілька, то вибирають одне з урахуванням додаткових міркувань
або інструкції технолога.
43