
Page 27 - 197_
P. 27
непрямо задається структура технологічного процесу або
принципи її вибору. Якщо не вдається реалізувати автоматичне
формування та оцінку структури, до проектування в
діалоговому режимі залучається технолог.
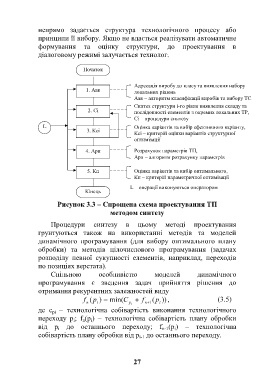
Початок
1. Аав Адресація виробу до класу та виявлення набору
локальних рішень
Аав – алгоритм класифікації виробів та вибору ТС
Синтез структури і-го рівня виявлення складу та
2. Сі послідовності елементів з окремих локальних ТР,
Сі – процедури синтезу
L Оцінка варіантів та вибір ефективного варіанту,
3. Ксі
Ксі – критерій оцінки варіантів структурної
оптимізації
4. Арп Розрахунок параметрів ТП,
Арп – алгоритм розрахунку параметрів
5. Кп Оцінка варіантів та вибір оптимального,
Кп – критерій параметричної оптимізації
L – операції виконуються оператором
Кінець
Рисунок 3.3 – Спрощена схема проектування ТП
методом синтезу
Процедури синтезу в цьому методі проектування
грунтуються також на використанні методів та моделей
динамічного програмування (для вибору оптимального плану
обробки) та методів цілочислового програмування (задачах
розподілу певної сукупності елементів, наприклад, переходів
по позиціях верстата).
Спільною особливістю моделей динамічного
програмування є зведення задач прийняття рішення до
отримання рекурентних залежностей виду
f (p ) min(C f (p )), (3.5)
n i p i n 1 i
де с – технологічна собівартість виконання технологічного
рі
переходу р ; f (р ) – технологічна собівартість плану обробки
і
і
n
від р до останнього переходу; f (р ) – технологічна
і
n-1
і
собівартість плану обробки від р до останнього переходу.
і-1
27