
Page 41 - 6913
P. 41
Таблиця 3.3 – Вихідні дані
Змінні параметри Варіанти
№
завдання 1 2 3 4 5 6
1 k 10 20 12 4 18 9
мп
2 k 1 0.4 2 4 7 1
тр
3 k 1 2.3 3 1 3 4.5
з
4 k 4 8.1 2 0.01 0.01 1
сг
5 k 0.08 0.1 0.1 0.003 2 0.2
тв
6 Т 0.1 0.02 2 0.2 1 0.3
мп
7 Т 1 0.01 0.04 0.1 1 0.5
тр
8 Т 0.1 0.2 0.1 0.1 0.01 0.01
з
9 Т 1 0.8 0.3 1 0.5 0.001
сг
Завдання 3. Для слідкуючої системи управління
потужністю гребної електричної настанови ГЕУ необхідно
сформувати сукупність діагностичних параметрів і послідовність
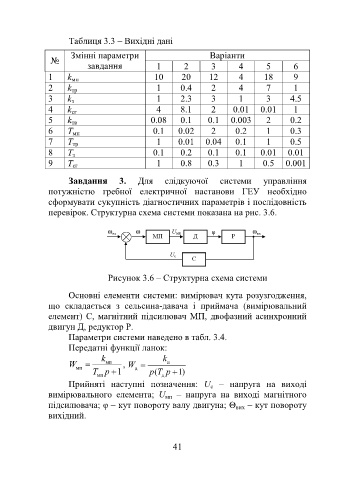
перевірок. Структурна схема системи показана на рис. 3.6.
вх U мп вх
МП Д Р
U с
С
Рисунок 3.6 – Структурна схема системи
Основні елементи системи: вимірювач кута розузгодження,
що складається з сельсина-давача і приймача (вимірювальний
елемент) С, магнітний підсилювач МП, двофазний асинхронний
двигун Д, редуктор Р.
Параметри системи наведено в табл. 3.4.
Передатні функції ланок:
k k
W мп , W д
мп д
T p 1 ( p T p 1)
мп д
Прийняті наступні позначення: U – напруга на виході
c
вимірювального елемента; U – напруга на виході магнітного
мп
підсилювача; φ – кут повороту валу двигуна; Θ – кут повороту
вих
вихідний.
41