
Page 48 - 6912
P. 48
а) б)
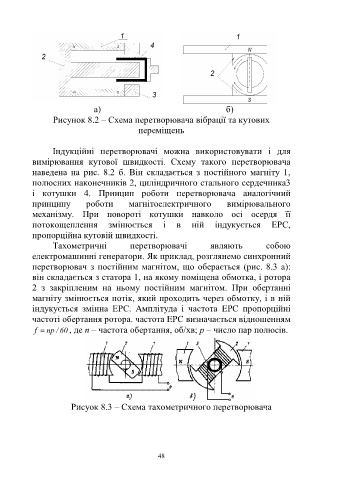
Рисунок 8.2 – Схема перетворювача вібрації та кутових
переміщень
Індукційні перетворювачі можна використовувати і для
вимірювання кутової швидкості. Схему такого перетворювача
наведена на рис. 8.2 б. Він складається з постійного магніту 1,
полюсних наконечників 2, циліндричного стального сердечника3
і котушки 4. Принцип роботи перетворювача аналогічний
принципу роботи магнітоелектричного вимірювального
механізму. При повороті котушки навколо осі осердя її
потокощеплення змінюється і в ній індукується ЕРС,
пропорційна кутовій швидкості.
Тахометричні перетворювачі являють собою
електромашинні генератори. Як приклад, розглянемо синхронний
перетворювач з постійним магнітом, що оберається (рис. 8.3 а):
він складається з статора 1, на якому поміщена обмотка, і ротора
2 з закріпленим на ньому постійним магнітом. При обертанні
магніту змінюється потік, який проходить через обмотку, і в ній
індукується змінна ЕРС. Амплітуда і частота ЕРС пропорційні
частоті обертання ротора. частота ЕРС визначається відношенням
f np / 60 , де п – частота обертання, об/хв; р – число пар полюсів.
Рисуок 8.3 – Схема тахометричного перетворювача
48