
Page 101 - 6878
P. 101
Додаток Д
Розрахунок модифікованого показника оцінки рівня
конкурентоспроможності підприємства (КСП)
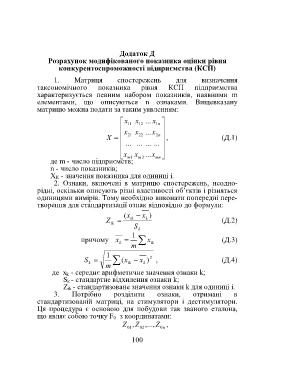
1. Матриця спостережень для визначення
таксономічного показника рівня КСП підприємства
характеризується певним набором показників, наявними m
елементами, що описуються n ознаками. Вищевказану
матрицю можна подати за таким уявленням:
x 11 x ... x n 1
12
x x ... x
X 21 22 2 n , (Д.1)
... ... ... ...
x
m1 x ... x mn
m2
де m - число підприємств;
n - число показників;
Х К - значення показника для одиниці i.
2. Ознаки, включені в матрицю спостережень, неодно-
рідні, оскільки описують різні властивості об’єктів і різняться
одиницями вимірів. Тому необхідно виконати попередні пере-
творення для стандартизації ознак відповідно до формули:
x ( x )
Z ik k (Д.2)
ik
S
k
1
причому x x (Д.3)
k ik
m
1
2
S (x x ) , (Д.4)
k ik k
m
де x k - середнє арифметичне значення ознаки k;
S k - стандартне відхилення ознаки k;
Z ik - стандартизоване значення ознаки k для одиниці i.
3. Потрібно розділити ознаки, отримані в
стандартизованій матриці, на стимулятори і дестимулятори.
Ця процедура є основою для побудови так званого еталона,
що являє собою точку F 0 з координатами:
Z , Z ,..., Z ,
01 02 0 n
100