
Page 5 - 4844
P. 5
ЛАБОРАТОРНА РОБОТА № 5
ВИВЧЕННЯ БУДОВИ ТОКАРНОГО ПАТРОННО-ЦЕНТРОВОГО
ВЕРСТАТА МОДЕЛІ 16А20Ф3
(4 год)
5.1 Мета заняття
Вивчити і засвоїти будову та кінематичну схему верстата, призначення
вузлів та механізмів; навчитись складати механічну та технологічну
характеристику окремих вузлів та верстата в цілому.
5.2 Зміст заняття
Вивчення призначення верстата та його вузлів, практичне складання
технічної та технологічної характеристики окремих вузлів.
5.3 Знання, вміння, навики
Після закінчення заняття студент повинен:
- знати будову кінематичну схему та призначення токарного патронно-
центрового верстата моделі 16А20Ф3;
- вміти складати технічну та технологічну характеристики верстата;
- набути навичок вивчення технологічних можливостей нового
верстатного обладнання.
Основні теоретичні положення
До верстатів з числовим програмним керуванням відносять верстати,
якими керують за допомогою систем, що забезпечують швидкий перехід на
будь-яку програму роботи шляхом її набирання на пульті пристрою ЧПК або
запису умовним кодом на програмоносії, за допомогою якого її вводять до
системи керування верстата. Як носії програми використовують перфокарти,
перфострічки, магнітні стрічки, магнітні барабани, фотоплівки, штекерні
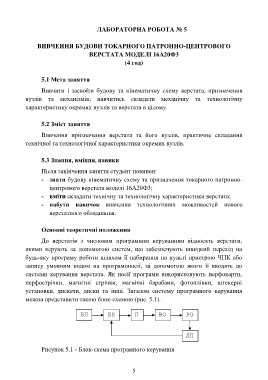
установки, дискети, диски та інші. Загалом систему програмного керування
можна представити такою блок-схемою (рис. 5.1).
ВП БК П ВО РО
ДП
Рисунок 5.1 - Блок-схема програмного керування
5