
Page 18 - 4843
P. 18
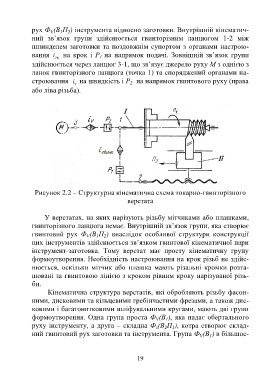
рух Ф (В П ) інструмента відносно заготовки. Внутрішній кінематич-
V
1
2
ний зв’язок групи здійснюється гвинторізним ланцюгом 1-2 між
шпинделем заготовки та поздовжнім супортом з органами настрою-
вання i на крок і Р на напрямок подачі. Зовнішній зв’язок групи
1
гв
здійснюється через ланцюг 3-1, що зв’язує джерело руху М з однією з
ланок гвинторізного ланцюга (точка 1) та споряджений органами на-
строювання i на швидкість і Р на напрямок гвинтового руху (права
2
v
або ліва різьба).
Рисунок 2.2 – Структурна кінематична схема токарно-гвинторізного
верстата
У верстатах, на яких нарізують різьбу мітчиками або плашками,
гвинторізного ланцюга немає. Внутрішній зв’язок групи, яка створює
гвинтовий рух Ф (В П ) внаслідок особливої структури конструкції
V
1
2
цих інструментів здійснюється зв’язком гвинтової кінематичної пари
інструмент-заготовка. Тому верстат має просту кінематичну групу
формоутворення. Необхідність настроювання на крок різьб не здійс-
нюється, оскільки мітчик або плашка мають різальні кромки розта-
шовані за гвинтовою лінією з кроком рівним кроку нарізуваної різь-
би.
Кінематична структура верстатів, які обробляють різьбу фасон-
ними, дисковими та кільцевими гребінчастими фрезами, а також дис-
ковими і багатонитковими шліфувальними кругами, мають дві групи
формоутворення. Одна група проста Ф (В ), яка надає обертального
V
1
руху інструменту, а друга – складна Ф (В П ), котра створює склад-
2
1
s
ний гвинтовий рух заготовки та інструмента. Група Ф (В ) в більшос-
1
V
19