
Page 276 - 4655
P. 276
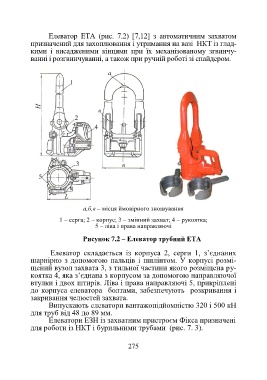
Елеватор ЕТА (рис. 7.2) [7,12] з автоматичним захватом
призначений для захоплювання і утримання на вазі НКТ із глад-
кими і висадженими кінцями при їх механізованому згвинчу-
ванні і розгвинчуванні, а також при ручній роботі зі спайдером.
а,б,в – місця ймовірного зношування
1 – серга; 2 – корпус; 3 – змінний захват; 4 – рукоятка;
5 – ліва і права направляючі
Рисунок 7.2 – Елеватор трубний ЕТА
Елеватор складається із корпуса 2, серги 1, з’єднаних
шарнірно з допомогою пальців і шплінтом. У корпусі розмі-
щений вузол захвата 3, з тильної частини якого розміщена ру-
коятка 4, яка з’єднана з корпусом за допомогою направляючої
втулки і двох штирів. Ліва і права направляючі 5, прикріплені
до корпуса елеватора болтами, забезпечують розкривання і
закривання челюстей захвата.
Випускають елеватори вантажопідйомністю 320 і 500 кН
для труб від 48 до 89 мм.
Елеватори ЕЗН із захватним пристроєм Фікса призначені
для роботи із НКТ і бурильними трубами (рис. 7. 3).
275