
Page 63 - 4189
P. 63
рахунок збільшення розмірів біну, однак це призводить до погіршення
роздільної здатності й детальності робіт.
2.4.6 Визначення відстані між лініями збудження
Визначивши Р, можна розрахувати наступний важливий параметр
- відстань ΔЛЗ між лініями збудження в метрах для ортогональної х п у з
системи:
ЛЗ 10 6 /(Б ) P (2.7)
х
х
Для розглянутого випадку (Р= 40, Бх = 50 м) ΔЛЗ х буде
дорівнювати 500 м.
Значення ΔЛВ х визначає відстань між лініями збудження, що при
заданій кількості активних каналів забезпечує необхідну кратність
спостережень (у розглянутому випадку N = 24). На практиці можливо
як збільшення, так і зменшення відстані ΔЛЗ х, але при збільшенні ΔЛВ х
при Б = 50 м, Р= 40, необхідна кратність N= 24 не буде досягнута.
2.4.7 Визначення максимальних і мінімальних віддалень
джерело-приймач
Вибір віддалення (виносу) розміщення пунктів спостережень
щодо пункту збудження виконують на основі розрахунків, польового
експерименту або моделювання. Для знаходження виносу можна
також використати досвід, накопичений при 2D сейсморозвідці. Із
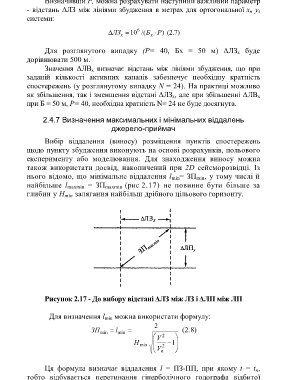
нього відомо, що мінімальне віддалення l min= ЗП min, у тому числі й
найбільше l maxmin = ЗП maxmin (рис 2.17) не повинне бути більше за
глибин у H min залягання найбільш дрібного цільового горизонту.
Рисунок 2.17 - До вибору відстані ΔЛЗ між ЛЗ і ΔЛП між ЛП
Для визначення l min можна використати формулу:
2
ЗП min l min (2.8)
V 2
H min 2 1
V
п
Ця формула визначає віддалення l = ПЗ-ПП, при якому t = t п,
тобто відбувається перетинання гіперболічного годографа відбитої
хвилі від границі, що залягає на глибин і H min.
62