
Page 142 - 4173
P. 142
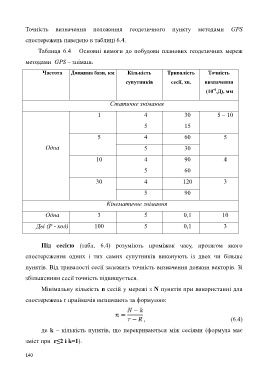
Точність визначення положення геодезичного пункту методами GPS
спостережень наведено в таблиці 6.4.
Таблиця 6.4 – Основні вимоги до побудови планових геодезичних мереж
методами GPS – знімань
Частота Довжина бази, км Кількість Тривалість Точність
супутників сесії, хв. визначення
-6
(10 .Д), мм
Статичне знімання
1 4 30 5 – 10
5 15
5 4 60 5
Одна 5 30
10 4 90 4
5 60
30 4 120 3
5 90
Кінематичне знімання
Одна 3 5 0,1 10
Дві (Р - код) 100 5 0,1 3
Під сесією (табл. 6.4) розуміють проміжок часу, протягом якого
спостереження одних і тих самих супутників виконують із двох чи більше
пунктів. Від тривалості сесії залежить точність визначення довжин векторів. Зі
збільшенням сесії точність підвищується.
Мінімальну кількість n сесій у мережі з N пунктів при використанні для
спостережень r приймачів визначають за формулою:
, (6.4)
де k – кількість пунктів, що перекриваються між сесіями (формула має
зміст при r≤2 і k=1).
140