
Page 64 - 313_
P. 64
1
такої схеми є реохода – калібрована дротина АВ. До точок А та В
приєднані невідомий R х та відомий R 0 опори , які мають спільну точку С.
Від елемента ε струм І розгалужується на струми І 1 та І 2. Потенціал точки
С( С) має проміжне значення між потенціалами точок А і В. Тобто на
реохорді АВ знайдеться така точка D, потенціал якої D буде дорівнювати
С точки С. Тому, якщо між точками С і D ввімкнути гальванометр, то він
покаже відсутність струму. Гальванометр, який фіксує наявність або
відсутність електричного струму, називається нуль-індикатором (на схемі
рис. 39.1 він позначений Н-І). Для знаходження на реохорді такої точки D,
коли струм через нуль-індикатор відсутній, використовується рухомий
контакт, який ковзає вздовж реохорда (стрілка біля точки D). Стан
місткової схеми при відсутності струму в ділянці CD (діагоналі містка)
називається станом рівноваги містка. Для виводу умови такої рівноваги
скористаємось другим законом Кірхгофа.
Для замкнутого контуру ACDA будемо мати рівняння (39.2), а для
контуру DCBD – рівняння (39.3). З цих рівнянь випливає (39.4) – умова
рівноваги містка. Для реохорда АВ, як каліброваної дротини, відношення
опорів її частин R AD та R DB можна замінити відношенням відповідних
довжин l 1 та l 2, які називаються плечами реохорда. Тому кінцевий вираз
прийме вигляд (39.5)
I 1R X – I 2R AD = 0 (39.2)
I 1R 0 – I 2R DB = 0 (39.3)
R AD
R R 0 (39.4)
X
R DB
l 1
R R (39.5)
X 0
l
2
С
РОБОЧА СХЕМА МІСТКА
УІТСОНА
К 2
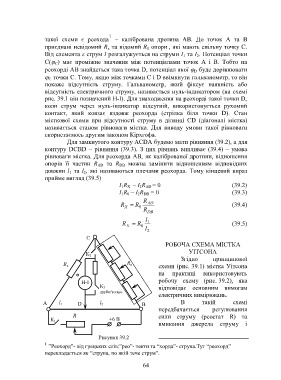
Згідно принципової
R х R о схеми (рис. 39.1) містка Уітсона
на практиці використовують
H-I робочу схему (рис. 39.2), яка
К 3 відповідає основним вимогам
грубо/точно
електричних вимірювань.
А l 1 D l 2 В В такій схемі
передбачається регулювання
R сили струму (реостат R) та
К 1 +6 В
вмикання джерела струму і
Рисунок 39.2
1
”Реохорд”- від грецьких слів:”рео”- текти та “хорда”- струна.Тут “реохорд”
перекладається як “струна, по якій тече струм”.
64