
Page 84 - 110
P. 84
220B
Ср
B
Сд
R р Рд
R ш Тр
R2
П
R
6,3 B п R5
С
R3 À R1
R4
R 2 R 1
3 2 1
D
Rt
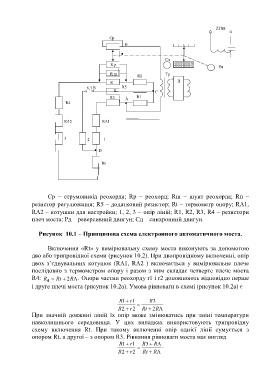
Ср – струмовивід реохорда; Rр – реохорд; Rш – шунт реохорда; Rп –
резистор регулювання; R5 – додатковий резистор; Rt – термометр опору; R1,
R2 – котушки для настройки; 1, 2, 3 – опір ліній; R1, R2, R3, R4 – резистори
плеч моста; Рд – реверсивний двигун; Сд – синхронний двигун.
Рисунок 10.1 – Принципова схема електронного автоматичного моста.
Включення «Rt» у вимірювальну схему моста виконують за допомогою
дво або трипровідної схеми (рисунок 10.2). При двопровідному включенні, опір
двох з’єднувальних котушок (R1, R2 ) включається у вимірювальне плече
послідовно з термометром опору і разом з ним складає четверте плече моста
R4: R Rt R2 . Опори частин реохорду r1 i r2 доповнюють відповідно перше
4
і друге плечі моста (рисунок 10.2а). Умова рівноваги в схемі (рисунок 10.2а) є
R1 r1 R3
R2 r2 Rt R2
При значній довжині ліній їх опір може змінюватись при зміні температури
навколишнього середовища. У цих випадках використовують трипровідну
схему включення Rt. При такому включенні опір однієї лінії сумується з
опором Rt, а другої – з опором R3. Рівняння рівноваги моста має вигляд
R1 r1 R3 R .
R2 r2 Rt R 