
Page 87 - 6735
P. 87
кривошипа знайти кінематичні характеристики повзуна:
переміщення, швидкість і прискорення в заданий момент часу.
Із законів механіки відомо, що швидкість і прискорення
визначаються як
x v
v= ; a= ,
t t
де x – елементарне переміщення за час t, v – елементарна
зміна швидкості за час t.
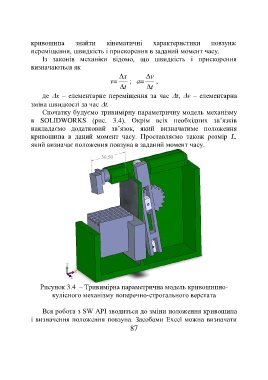
Спочатку будуємо тривимірну параметричну модель механізму
в SOLIDWORKS (рис. 3.4). Окрім всіх необхідних зв’язків
накладаємо додатковий зв’язок, який визначатиме положення
кривошипа в даний момент часу. Проставляємо також розмір L,
який визначає положення повзуна в заданий момент часу.
Рисунок 3.4 – Тривимірна параметрична модель кривошипно-
кулісного механізму поперечно-строгального верстата
Вся робота з SW API зводиться до зміни положення кривошипа
і визначення положення повзуна. Засобами Excel можна визначати
87