
Page 53 - 4420
P. 53
величиною. Існує два види зрівноважувального перетворення:
слідкуюче (від'ємний зворотний зв'язок між виходом і входом)
і розгортальне (автономне). Слідкуюче може бути з
статичною або з астатичною характеристикою перетворення.
У випадку слідкуючого перетворення вхідна величина Х
зрівноважується вихідною величиною Х К=К 2Y кола зворотного
перетворення, де К 2 - коефіцієнт перетворення, а Y - вихідна
величина всього кола перетворення.
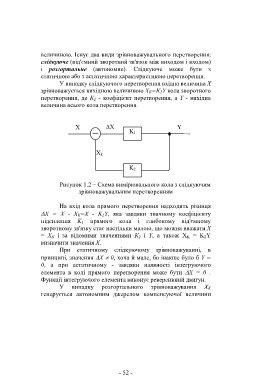
X X Y
K 1
X k
K 2
Рисунок 1.2 – Схема вимірювального кола з слідкуючим
зрівноважувальним перетворенням
На вхід кола прямого перетворення надходить різниця
Х = Х - X K=X - K 2Y, яка завдяки значному коефіцієнту
підсилення K 1 прямого кола і глибокому від'ємному
зворотному зв'язку стає настільки малою, що можна вважати Х
= Х К і за відомими значеннями К 2 і Y, а також X K = K 2Y
визначити значення X.
При статичному слідкуючому зрівноважуванні, в
принципі, значення Х 0, хоча й мале, бо інакше було б Y =
0, а при астатичному - завдяки наявності інтегруючого
елемента в колі прямого перетворення може бути Х = 0 .
Функції інтегруючого елемента виконує реверсивний двигун.
У випадку розгортального зрівноважування X K
генерується автономним джерелом компенсуючої величини
- 52 -