
Page 38 - 4279
P. 38
оцінки показів приладу – 160 мс; тривалість мимовільного
відволікання бурильника – 140 мс; час відімкнення барабана
лебідки – 110 мс; швидкість підйому бурильної колони – 1 м/с.
Задача 5. Визначити кількість каналів зв’язку, за станом
яких може стежити оператор, якщо за умовами протікання
процесу управління оператор повинен виявити вихід з ладу
каналів зв’язку не більше, ніж через t = 5с після його виникнення
для такої організації інформаційного поля: проектується табло
відображення стану каналів зв’язку у вигляді елементів
сигналізації, представлених індикаторами розміром 2525 мм.
Відстань між індикаторами 10 мм. При виході каналу з ладу
вмикається звуковий сигнал і висвітлюється блимаючим світлом
з частотою спалахів f = 6,5 Гц відповідний індикатор. Оператор
розміщений на відстані L = 60 см від табло. Кутовий розмір
індикатора становить = 10. Час фіксації спалаху індикатора
дорівнює 0,28 с.
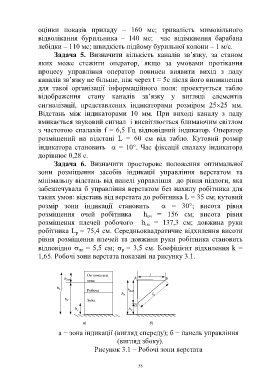
Задача 6. Визначити просторове положення оптимальної
зони розміщення засобів індикації управління верстатом та
мінімальну відстань від панелі управління до рівня підлоги, яка
забезпечувала б управління верстатом без нахилу робітника для
таких умов: відстань від верстата до робітника L = 35 см; кутовий
розмір зони індикації становить = 30; висота рівня
розміщення очей робітника h оч = 156 см; висота рівня
розміщення плечей робочого h пл = 137,3 см; довжина руки
робітника L = 75,4 см. Середньоквадратичне відхилення висоти
р
рівня розміщення плечей та довжини руки робітника становить
відповідно = 5,5 см; = 3,5 см. Коефіцієнт відхилення k =
пл
р
1,65. Робочі зони верстата показані на рисунку 3.1.
Оптимальна l
h опт А Б
зона
h 1
Робоча h роб
h п l р
h 2 Зона
О
h у h у
а) б)
а − зона індикації (вигляд спереду); б − панель управління
(вигляд збоку).
Рисунок 3.1 – Робочі зони верстата
38