
Page 30 - 31
P. 30
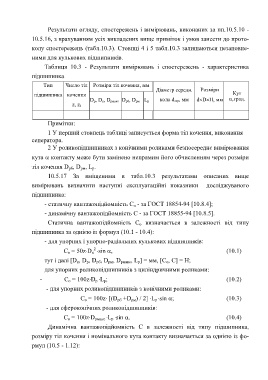
Результати огляду, спостережень i вимiрювань, виконаних за пп.10.5.10 -
10.5.16, з врахуванням усіх викладених вище примiток i умов занести до прото-
колу спостережень (табл.10.3). Стовпцi 4 i 5 табл.10.3 залишаються незаповне-
ними для кулькових пiдшипникiв.
Таблиця 10.3 - Результати вимiрювань і спостережень - характеристика
підшипника
Тип Число тiл Розмiри тiл кочення, мм
Дiаметр середн. Розмiри
пiдшипника кочення Кут
D р, D к, D рмакс D рб, D рм L р кола d сер, мм dDH, мм ,град.
z, z i
Примiтки:
1 У перший стовпець таблиці записується форма тіл кочення, виконання
сеператора.
2 У роликопiдшипниках з конiчними роликами безпосереднє вимiрювання
кута контакту може бути замiнено непрямим його обчисленням через розмiри
тiл кочення D рб, D рм, L р.
10.5.17 За вмiщеними в табл.10.3 результатами описаних вище
вимiрювань визначити наступнi експлуатацiйнi показники дослiджуваного
пiдшипника:
- статичну вантажопiдйомнiсть C o - за ГОСТ 18854-94 [10.8.4];
- динамiчну вантажопiдйомнiсть C - за ГОСТ 18855-94 [10.8.5].
Статична вантажопiдйомнiсть C o визначається в залежностi вiд типу
пiдшипника за однiєю iз формул (10.1 - 10.4):
- для упорних i упорно-радiальних кулькових пiдшипникiв:
2
C o = 50zD к sin , (10.1)
тут і далі [D к, D р, D рб, D рм, D рмакс, L р] = мм, [C o, C] = Н;
для упорних роликопiдшипникiв з цилiндричними роликами:
- C o = 100zD р L р; (10.2)
- для упорних роликопiдшипникiв з конiчними роликами:
C o = 100z [(D рб +D рм) / 2]L р sin (10.3)
- для сфероконiчних роликопiдшипникiв:
C o = 100zD рмакс L р sin (10.4)
Динамiчна вантажопiдйомнiсть C в залежностi вiд типу пiдшипника,
розмiру тiл кочення i номiнального кута контакту визначається за однiєю iз фо-
рмул (10.5 - 1.12):