
Page 54 - 2577
P. 54
Поля:
- Загального керування потоком (Generics Flow Control - CFC). Можливе
призначення цього поля – допомогти користувачу в керуванні трафіком при
різних рівнях якості обслуговування, наприклад, пом’якшити короткочасні
перенавантаження у мережі.
- Ідентифікатор віртуального шляху VPI. Він займає 8 біт у інтерфейсі між
мережею і користувачем і 12 біт у внутрішньому інтерфейсі.
- Ідентифікатор віртуального каналу VCI, який служить для маршрутизації до
кінцевого споживача.
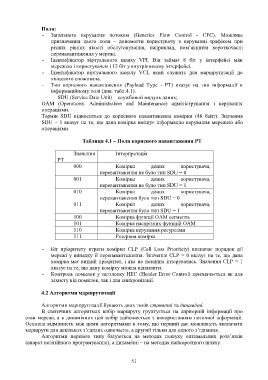
- Тип корисного навантаження (Payload Type - PT) вказує на тип інформації в
інформаційному полі (див. табл.4.1).
SDU (Service Date Unit) – службовий модуль даних;
ОАМ (Operations. Administration and Maintenance) адміністрування і керування
операціями.
Термін SDU відноситься до корисного навантаження комірки (48 байт). Значення
SDU = 1 вказує на те, що дана комірка вміщує інформацію керування мережею або
операціями.
Таблиця 4.1 – Поля корисного навантаження РТ
Значення Інтерпретація
РТ
000 Комірки даних користувача,
перевантаження не було тип SDU = 0
001 Комірки даних користувача,
перевантаження не було тип SDU = 1
010 Комірки даних користувача,
перевантаження було тип SDU = 0
011 Комірки даних користувача,
перевантаження було тип SDU = 1
100 Комірка функції ОАМ сегмента
101 Комірка наскрізних функцій ОАМ
110 Комірка керування ресурсами
111 Резервна комірка
- Біт пріоритету втрати комірки CLP (Cell Loss Prioritety) визначає порядок дії
мережі у випадку її перенавантаження. Значення CLP = 0 вказує на те, що дана
комірка має вищий пріоритет, і яка не повинна ігноруватись. Значення CLP = 1
вказує на те, що дану комірку можна відхилити.
- Контроль помилок у заголовку НЕС (Header Error Control) призначається як для
захисту від помилок, так і для синхронізації.
4.2 Алгоритми маршрутизації
Алгоритми маршрутизації бувають двох типів статичні та динамічні.
В статичних алгоритмах вибір маршруту грунтується на априорній інформації про
стан мережі, а в динамічних цей вибір здійснюється з використанням поточної інформації.
Основна відмінність між цими алгоритмами в тому, що перший дає можливість визначати
маршрути для декількох з’єднань одночасно, а другий тільки для одного з’єднання.
Алгоритми першого типу базуються на методах пошуку оптимальних розв’язків
(апарат нелінійного програмування), а динамічні – на методах найкоротшого шляху.
51